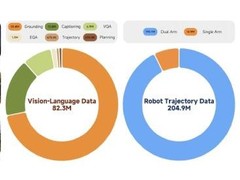
高德正筹备推出自主研发的具身导航基座模型。该模型依托业内规模最大的具身导航数据引擎,在处理长距离、多步骤、环境动态变化的复杂导航任务方面实现了显著能力提升。
区别于现有多数仅支持基础路径规划的导航系统,这一基座模型可支撑机器人在真实、开放的物理环境中完成跨场景任务,例如多区域物品递送、动态目标跟随等具身交互服务。
为加速相关技术研发与落地,高德已于2026年1月正式组建具身业务部门,并同步启动系列专业岗位招聘。当前探索方向涵盖服务机器人、四足移动平台等多种硬件载体形态。

高德正筹备推出自主研发的具身导航基座模型。该模型依托业内规模最大的具身导航数据引擎,在处理长距离、多步骤、环境动态变化的复杂导航任务方面实现了显著能力提升。
区别于现有多数仅支持基础路径规划的导航系统,这一基座模型可支撑机器人在真实、开放的物理环境中完成跨场景任务,例如多区域物品递送、动态目标跟随等具身交互服务。
为加速相关技术研发与落地,高德已于2026年1月正式组建具身业务部门,并同步启动系列专业岗位招聘。当前探索方向涵盖服务机器人、四足移动平台等多种硬件载体形态。
麒麟9020芯片,第二代红枫影像,鸿蒙AI
第五代骁龙8至尊版,2K三星珠峰屏,超感触控肩键
天玑9500,哈苏2亿超清长焦镜头,7500mAh电池
第五代骁龙8,165Hz三星高刷屏,5000万潜望长焦
天玑9500s芯片,9000mAh超长续航,1.5K直屏
1800万像素Center Stage前摄,全天电池续航,A19 Pro芯片
骁龙8至尊版,7100mAh大电池,青山护眼
A19芯片,4800万像素融合式双摄系统,6.3英寸
金标十面抗摔,IP69防水,8300mAh电池
第四代骁龙8s 风驰版,9000mAh冰川电池,165超高刷电竞东方屏



























































评论
更多评论