
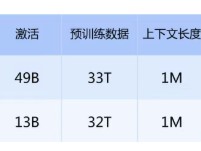
阮翀加盟元戎启行后首次公开亮相,详细阐述了其主导研发的40B参数规模视觉语言动作模型。该模型采用模块化架构,可清晰划分为视觉理解、语言交互与动作执行三大核心组件,显著提升了自动驾驶系统的研发效率。
阮翀以实际研发场景为例,说明该基座模型如何加速技术迭代:首先,通过端到端训练过程直接暴露模型能力短板,从而快速定位数据覆盖盲区;其次,依托云端构建的高保真虚拟驾驶环境,对采集数据的质量进行系统性评估,大幅压缩模型优化周期;第三,支持对AI驾驶行为进行毫秒级实时监测与动态纠偏,实现策略输出与物理执行的紧密耦合。
在随后的圆桌交流中,阮翀就物理人工智能的发展路径发表见解,指出构建感知、决策、执行闭环是推动AI真正融入物理世界的核心前提。谈及大语言模型的快速发展,他表示虽认可其重要价值,但现阶段更聚焦于探索AI在具身智能与真实场景落地中的深层技术路径。










































评论
更多评论