
2026年6月1日,英伟达正式发布NVIDIA Isaac GR00T人形机器人参考设计。这是业界首个基于NVIDIA Jetson Thor硬件平台与NVIDIA Isaac GR00T开放软件框架联合构建的开放式人形机器人参考方案。
该参考设计融合了宇树H2 Plus人形机器人本体、双SharpaWave触觉五指灵巧手,以及由NVIDIA Jetson Thor驱动的高性能嵌入式计算系统和完整的Isaac GR00T软件工作流。通过软硬一体化整合,方案显著简化开发路径,助力研究团队高效完成从系统启动、运动控制到技能训练及真实环境验证的全流程。
该机器人具备75个自由度:其中宇树H2机器人本体贡献31个自由度,左右双臂各搭载一套SharpaWave五指手,合计提供22个自由度。整机配备多模态感知系统,包含头部立体视觉模组、双腕部摄像头及高精度惯性测量单元,实现全向环境感知与实时姿态估计。
在运动性能方面,机器人具备优异的全身协同控制能力。单臂最大输出扭矩达120牛·米,单腿峰值扭矩达360牛·米;手臂额定负载为7公斤,瞬时峰值负载可达15公斤。
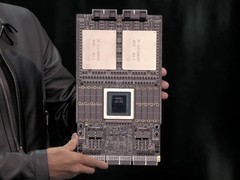
其核心计算平台采用NVIDIA Jetson AGX Thor T5000,集成Blackwell架构GPU,AI算力达2070 FP4 teraflops,搭载14核Arm CPU与128GB统一内存,可同步处理多路传感器数据并实时执行复杂机器人推理任务。
通信与交互能力方面,设备支持千兆以太网、Wi-Fi 6、蓝牙5.2及高速USB接口,并内置麦克风阵列与扬声器系统,支持自然语音交互。供电系统采用15安时、0.972千瓦时高能量密度电池,典型工况下续航约3小时;同时集成远程急停机制,确保操作过程中的响应速度与人身安全。
此外,NVIDIA Isaac GR00T开发者平台将同步适配宇树G1人形机器人,相关代码与模型资源计划近期在主流开源平台上线。NVIDIA Isaac GR00T参考人形机器人整机预计于2026年底由宇树完成量产交付。

































评论
更多评论