1、 简介
2、 在电脑上安装功能设置表软件,按实际需求配置各项参数,再通过数据线将设定信息传输至控制器,之后即可脱离电脑独立运行。6.3版控制器支持直接通过USB接口下载数据,无需额外安装驱动程序,操作更加便捷。以下是功能设置表的具体安装步骤说明。
3、 二、安装应用程序
4、 先解压再安装文件。
5、 运行解压后文件夹内的 tpc V6.3_setup 安装程序即可开始安装。
6、 当弹出安装程序窗口后,点击其中的确认按钮即可。
7、 直接点击安装按钮,使用默认对话框中的路径进行安装。
8、 弹出选择程序组窗口后,点击继续即可。
9、 安装成功提示出现后,点击确认按钮,完成安装。
10、 点击电脑左下角开始菜单,在所有程序中找到程序设置表并运行即可。
11、 数据下载方法
12、 将设定好的功能数据从电脑传输至控制器,完成后控制器可独立运行,数据长期保存。请依照以下步骤进行数据下载操作。
13、 接好电缆线
14、 将数据线一端接入控制器下载口,另一端连接电脑USB接口。
15、 通电启动
16、 将控制器接入直流24V电源,务必确保正负极连接无误。
17、 数据下载服务
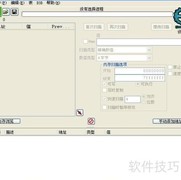
18、 所示,完成数据设置后,点击USB下载区域的确认按钮,当出现图中红圈标注的连接成功,可以下载数据!绿色提示时,再点击下载按钮,即可开始下载数据。
19、 启动程序
20、 数据下载完毕后,重新为控制器通电,设备随即启动运行。
21、 四、接线端
22、 为TPC8-8TD型控制器的接线端子示意图,不同型号可能存在差异。上排端子包含24V电源输入端及8路输出端,PE端用于连接保护地线;下排端子设有8路输入端和电源输出端+E,各端子连接需按规范进行,确保设备安全稳定运行。
23、 控制器输出可直接驱动24V电磁阀、继电器等负载,负载连接于输出端与DC+之间,DC+为24V电源,每路最大驱动电流为300mA。
24、 五、接线原理图示
25、 表控可驱动两轴步进电机,通过Y1至Y4端口输出控制信号,平时亦可用作通用输出。下图为表控外部接线原理示意图。
26、 控制器输出端采用晶体管集电极开路设计,当输出有效时,晶体管导通,输出为低电平,等效于开关接地;无输出时,晶体管处于截止状态,呈现开路。该输出可直接控制24V继电器、电磁阀、指示灯、蜂鸣器等设备,每路最大负载电流不超过300毫安(0.3A),或功率不超过7瓦。若负载超出此范围,须通过外接继电器进行驱动,以确保安全运行。严禁在输出端发生过载或短路的情况下长期使用。特别提醒:因用户操作不当导致输出端过载或短路,造成控制器损坏的,不在免费保修范围内,请务必按照规范连接负载,避免设备受损。
27、 控制器输出端接线时,负载的高端连接至DC+端,低端则接入Y输出端。多个负载的高端可共用一根导线,该公用线直接连至24V+端(DC+与24V+在控制器内部为同一电源线),各负载的低端分别对应连接各自的Y端口,确保独立控制。
28、 控制器输入端采用低电平有效设计。当接入开关时,一端连接地线EG,另一端接输入端X。若使用接近开关等数字量传感器,建议选用24V供电的NPN型常闭输出传感器,其输出特性为低电平有效。图中展示了开关及传感器等数字输入设备的接线方式。+E端子可提供24V电源输出,便于直接为外部传感器供电,简化接线过程,提高系统集成度和使用便利性。
29、 六、步进电机接线示意图
30、 所示,驱动器与控制器共用24V电源供电,将脉冲PU和方向DR输入信号的高端并接至24V正极,控制器输出端通过串接2K电阻分别连接至驱动器的脉冲和方向输入端,实现信号传输与电平匹配。















































评论
更多评论