若机器人始终静止,难免显得呆板。赋予其灵活动作,趣味倍增。如何实现按指令自如移动,成为关键所在。
1、 先点击流程控制模块里的永久循环,机器人便会持续运行,直至断电才会停止。
2、 在输出模块中加入直行与转向指令,使机器能够前进并转弯。
3、 双击直行程序,设定移动速度和时间后确认。
4、 双击运行转向程序,设定旋转角度为180度,速度可调,注意控制左右方向。
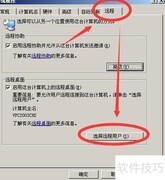
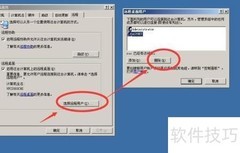
5、 点击仿真按钮,进入仿真界面。
6、 点击仿真或3D仿真按钮,即可测试机器人移动效果。
7、 只需双击转向程序,将转动角度设为90度,操作方法与来回直行相同。
8、 与之前相同,但需所示再次添加直行和转向,其中每次转向均为90度转弯。
9、 两个直行程序的运行时间可分别调节且互不相同,其数值对应长方形的长与宽。
10、 组装机器人并安装程序后,即可投入使用。
11、 觉得有用就投个票,分享给更多人吧!











































评论
更多评论